At DataDrone, we invest in the most advanced Drone Surveying Technology Ireland has to offer. Our fleet is engineered to provide sub-centimeter accuracy for construction, environmental, and industrial projects. By integrating high-end sensors like the 61MP Sony A7RIV and Velodyne LiDAR, we deliver data our clients need. reliable off-the-shelf solutions for lower-complexity sites where our core competencies in photogrammetry still deliver industry-leading results.
The core of our Drone Surveying Technology in Ireland starts on the ground. We utilize the Emlid RS2 L1/L2 GNSS receiver as a dedicated base station to process airborne Rinex/UBX files via a PPK (Post-Processed Kinematic) workflow.
Fixed Solutions: This ensures a fixed solution for every image and LiDAR point collected, providing centimeter-level accuracy.
GCP & Check Points: We also utilize the antenna as a rover to measure Ground Control Points (GCPs) and independent check points to verify the absolute accuracy of our final digital products.
DJI M300 RTK | 61MP Sony A7RIV & LiDAR Integration
The DJI M300 RTK is our primary platform for high-resolution data collection.
61MP Sony A7RIV: Mounted on a Gremsy Pixy SM gimbal, this full-frame sensor allows us to capture incredible detail while maintaining manual control over shutter, ISO, and aperture—essential for consistent data quality.
Dual Payload Optimization: We can carry both LiDAR and RGB sensors simultaneously. This allows us to use the LiDAR point cloud for orthorectification, creating a more efficient and accurate photogrammetry workflow.
Terrain Following (UgCS): For quarries and mountainous areas, we use UgCS to create custom terrain models, ensuring the drone follows the landscape perfectly for consistent GSD (Ground Sample Distance).
DJI M210 | Multispectral & Triple-Sensor Platform
The DJI M210 is an operational workhorse for our environmental drone surveys.
Triple-Sensor Capability: This platform can collect RGB imagery, LiDAR data, and multispectral imagery simultaneously. This level of efficiency is unmatched for forestry and habitat mapping projects.
Remote Operations: We carry 4 sets of high-capacity TB55 batteries and a dedicated 2300W inverter generator, ensuring we remain powered in even the most remote Irish locations.
DJI Phantom 4 Pro PPK | Redundant Aerial Systems
This drone can be confidently used for data collection jobs over sites with lower levels of terrain and proportional complexity .For lower-complexity sites, the Phantom 4 Pro PPK provides a reliable, high-resolution backup, ensuring we have triple redundancy in the field to keep projects on schedule.
The drone is powered by a single battery and we carry 5 and several chargers, again with remote charging capabilities.
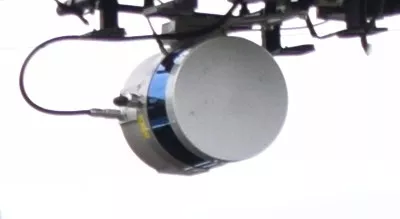
Velodyne LiDAR | Aerial & Terrestrial SLAM Workflow
Our Velodyne LiDAR is a versatile sensor used for Drone LiDAR Scanning Ireland.
Airborne: Integrated with GNSS/IMU for rapid mapping of vast areas, penetrating vegetation to create accurate DTMs and contour lines.
Terrestrial (Backpack): In GNSS-denied environments like dense forest canopies, we utilize a SLAM (Simultaneous Localization and Mapping) workflow to generate high-accuracy point clouds on foot.
Data Integrity and Field Reliability
Implementing the best Drone Surveying Technology Ireland has to offer is only half the battle; ensuring that data is secure and consistently captured is where we excel. Our operational workflow is built on redundancy and precision to guarantee project timelines are met regardless of environmental challenges.
Hardware Redundancy: We carry secondary and tertiary backup aircraft (M210 and Phantom 4 Pro) on every mission. This ensures that a minor hardware issue never results in a “dead day” in the field, keeping your project on schedule.
On-Site Data Verification: Utilizing our high-performance MSI GP66 data processing laptop, we perform initial quality checks and point-cloud density verifications while still on-site. This eliminates the need for costly re-flights and ensures 100% data coverage before we demobilize.
Power Autonomy: With our converted field vehicle equipped with leisure batteries, heavy-duty inverters, and a 2300W silent generator, we can operate indefinitely in remote Irish locations without relying on external power grids.
We secure our data and comply with GDPR. We also secure our advanced web mapping deliverables we provide our clients with.
This rigorous approach to Drone Surveying Technology Ireland ensures that we don’t just collect secured data—we deliver actionable, survey-grade insights that you can trust for your most critical engineering and environmental decisions.