L1/L2 GNSS receiver that we use as a base station to process along with airborne Rinex/UBX files to achieve a fixed solution for each image/lidar point collected (PPK workflow). This ensures efficiency, reliability and control in collecting georeferenced input data which we process to create centimetre-level accurate digital products. We also use the antenna as a rover to measure ground control points to further correct/georeference data where required and/or to use these points as check points to verify the accuracy of our data.
DJI M300 RTK
This drone is used to collect very high resolution imagery with the 61MP Sony A7RIV camera but we can also use it to collect LiDAR data. It is capable of carrying both sensors as a dual payload, which allows for coloured point clouds and optimisation of orthomosaic generation by using the LiDAR point cloud for orthorectification instead of processing a point cloud with more computationally intensive photogrammetry leading to significant efficiency gains.
When carrying out a LiDAR mission over complex terrain e.g. quarried area (where the terrain frequently changes) mountainous area etc., the drone and camera setup can be used to first create an accurate and reliable terrain model to fly according to (terrain-following to achieve consistency) where standard SRTM data in our flight planning software (UgCS) may not be reliable.
The camera is mounted with the Gremsy Pixy SM gimbal which allows for remotely operate camera settings (it is important to manage camera settings based on lighting conditions and remain with acceptable shutter/ISO/aperture tolerances and to ensure manual focus). Synrconisation is also done with the drone’s RTK to capture higher accuracy images before final georeferencing with ground control points (GCPs).
The drone is powered by 2 batteries we carry several sets and a charging case and to ensure we are consistently powered. In remote conditions we can charge batteries through our converted vehicle with leisure battery, inverters etc. along with an additional 2300W inverter generator.
DJI M210
This drone is an advance upon the M600 in terms of flight time and range. It has a lower payload capacity than the M600 which it makes up for in terms of portability and logistical efficiency. This aircraft is an operational workhorse however, since with our equipment, it can act as a triple payload/sensor platform and collect three types of data simultaneously (RGB imagery, LiDAR data and multispectral imagery) which means very high levels of efficiency with the M600 being pulled out primarily in isolated cases of an accurate DEM needing to be created first.
This drone is powered by two sets of batteries and we carry 4 sets of higher capacity TB55 batteries along with a quad charger and two dual chargers to remain consistently powered with operational power for charging in remote conditions.
DJI Phantom 4 Pro PPK
This drone can be confidently used for data collection jobs over sites with lower levels of terrain and proportional complexity. In theory it backs up our equipment to the third degree at least as far as continuing in operation with RGB imagery collection.
The drone is powered by a single battery and we carry 5 and several chargers, again with remote charging capabilities.
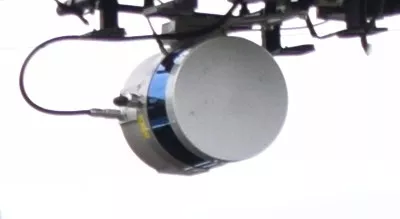
Velodyne LiDAR GNSS/IMU integrated
This sensor can be used as an airborne unit on either of the M210 or M600 drones. As an airborne unit we can survey vast areas of terrain with much faster processing times. The integration means that we can quickly create a point cloud consisting of fix solution points with form the foundation of additionally processed georeferenced products (DEMs, contour lines etc.). Point cloud processing is much faster than through photogrammetric processes, but if an orthomosaic is still required for a project the LiDAR can be dual mounted with the X4S camera on the M210 (or Sony imagery used for this in cases of pre-creation of accurate DEMs).
As a terrestrial unit, the LiDAR can be used as a ground-based scanner on a backpack and also in GNSS denied environments (e.g. under forest canopy) with a SLAM workflow utilised – trajectory processing based on LiDAR points rather than GNSS data.